Ele deve correr ou deve comer?
Na dúvida, deve aprender.
Pac-Man procura a recompensa.
Ele deve correr ou deve comer?
Na dúvida, deve aprender.
Neste trabalho, você irá implementar os algoritmos iteração de valor e q-learning. Os agentes serão testados primeiro no Gridworld (exemplo das aulas), depois num simulador de robô (Crawler) e no Pac-Man.
O código deste projeto contém os seguintes arquivos, que estão disponíveis em um arquivo zip:
valueIterationAgents.py |
Um agente que executa o algoritmo de iteração de valor para um PDM conhecido. |
qlearningAgents.py |
Agentes que executam o algoritmo Q-learning para o Gridworld, Crawler e Pac-Man |
analysis.py |
Um arquivo para colocar as suas respostas às perguntas abaixo em relação a parâmetros do algoritmo. |
mdp.py |
Define métodos para PDMs gerais. |
learningAgents.py |
Define as classes base ValueEstimationAgent e QLearningAgent,
que os seus agentes devem extender. |
util.py |
Funções auxiliares que podem ser utilizadas no trabalho, incluindo util.Counter, que é especialmente útil para o q-learning. |
gridworld.py |
A implementação do Gridworld |
featureExtractors.py |
Classes para extrair atributos de pares (estado,ação). Usadas para o agente de q-learning approximado (em qlearningAgents.py). |
environment.py |
Classe abstrata para ambientes gerais de aprendizagem por reforço. Usada
por gridworld.py. |
graphicsGridworldDisplay.py |
Visualização gráfica do Gridworld. |
graphicsUtils.py
|
Funções auxiliares para visualização gráfica. |
textGridworldDisplay.py |
Plug-in para a interface de texto do Gridworld. |
crawler.py |
O código do agente crawler. Será executado mas não modificado. |
graphicsCrawlerDisplay.py |
GUI para o robô Crawler. |
O que deve ser entregue: Os arquivos
valueIterationAgents.py,
qlearningAgents.py, e
analysis.py serão modificados no trabalho.
Você deve submeter apenas esses arquivos. Por favor não modifique nenhum outro arquivo.
Cada aluno deve entregar esses dois arquivos por e-mail e deve entregar também um relatório
mostrando o resultado de cada execução. O trabalho é individual.
Para começar, execute o Gridworld no modo de controle manual, que usa as teclas de seta:
python gridworld.py -m
Você deve ver o exemplo que vimos em sala de aula. O ponto azul é o agente. Note que quando você pressiona a seta pra cima, o agente só se move pra cima 80% das vezes, de acordo com a característica do ambiente.
Vários aspectos da simulação podem ser controlados. Uma lista completa de opções pode ser obtidas com:
python gridworld.py -h
O agente default se move aleatoriamente
python gridworld.py -g MazeGrid
Você deve ver o agente aleatório passear pelo grid até encontrar uma saída.
Nota: O PDM do gridworld foi implementado de tal forma que você primeiro MDP
deve entrar em um estado pré-terminal (as caixas duplas mostradas no grid) e depois executar a ação especial
'exit' para que o episódio realmente termine (o agente entra no estado TERMINAL_STATE, que não é mostrado
na interface). Se você executar um episódio manualmente, o seu retorno pode ser menor do que o esperado devido
à taxa de desconto (-d para mudar; 0.9 por default).
Olhe para a saída na linha de comando python que fica por trás da visualização gráfica (ou use -t
para suprimir a visualização gráfica). Você verá o que aconteceu em cada transição do agente (para desligar essa
saída, use -q).
Como no Pac-Man, posições são representadas por coordenadas cartesianas (x,y)
e os arrays são indexados por [x][y], com 'north' sendo a direção
de aumento do y, etc. Por default,
na maioria das transições (não-terminais) o agente vai receber recompensa 0, mas isso pode ser mudado com
a opção (-r).
Passo 1 (2 pontos) Escreva um agente de iteração de valor em
ValueIterationAgent, que está parcialmente especificada no arquivo
valueIterationAgents.py.
O seu agente de iteração de valor é um planejador offline, não um agente de aprendizado por reforço,
então a opção relevante nesse caso é o número de iterações do algoritmo de iteração de valor (opção
-i) na fase de planejamento. O agente ValueIterationAgent recebe um PDM e
executa o algoritmo de iteração de valor pelo número especificado de iterações no próprio construtor.
O algoritmo de iteração de valor calcula estimativas dos valores de utilidade ótimos
considerando k passos, Vk. Além de implementar a iteração de valor, implemente
os seguintes métodos para o agente ValueIterationAgent usando Vk.
getValue(state) retorna o valor (de utilidade) de um estado.
getPolicy(state) retorna a melhor ação de acordo com os valores calculados.
getQValue(state, action) retorna o q-valor do par (state, action).
Essas quantidades são mostradas na GUI: valores/q-valores são os números dentro dos quadrados e políticas são representadas por setas em cada estado.
Importante: Use a versão "batch" da iteração de valor onde cada vetor Vk é calculado a partir de um vetor fixo da iteração anterior Vk-1 (como na aula), e não a versão "online" onde os valores são atualizados continuamente. Essa diferença é discutida em Sutton & Barto no sexto parágrafo do capítulo 4.1.
Nota: A política obtida dos valores de utilidade da iteração k (que levam em consideração as próximas k recompensas) deve refletir as próximas k+1 recompensas (isto é, você deve retornar πk+1). Da mesma forma, os q-valores também devem refletir as próximas k+1 recompensas (isto é, você deve retornar Qk+1). Isso acontece naturalmente quando utilizamos as fórmulas adequadas.
Você pode supor que 100 iterações são suficientes para convergência nas perguntas abaixo.
O comando seguinte carrega o seu agente ValueIterationAgent, que irá calcular uma política e
executá-la 10 vezes. Aperte qualquer tecla pra ver os valores, q-valores, e a simulação.
Você deve ver que o valor do estado inicial (V(start)) e a média empírica das recompensas devem
ser bem próximos.
python gridworld.py -a value -i 100 -k 10
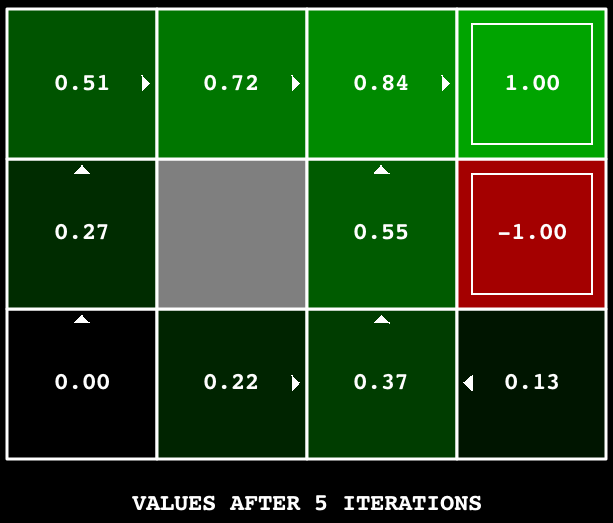
Dica: No grid default BookGrid, rodar a iteração de valor por 5 iterações deve dar a seguinte saída:
python gridworld.py -a value -i 5
Dica: Use a classe util.Counter em util.py,
que é um dicionário com valor default 0. Métodos como o totalCount podem ajudar a simplificar o
seu código. Porém tome cuidado com o argMax: o argmax que você quer pode não ter chave no contador!
Passo 2 (0.5 ponto) No BridgeGrid com o desconto default de 0.9
e o ruído default de 0.2, a política ótima não atravessa a ponte.
Modifique somente UM dos parâmetros: ou o desconto ou o ruído de tal forma que a política ótima faça com que o
agente tente atravessar a ponte. Coloque sua resposta em question2() do
analysis.py.
(Ruído é a probabilidade que o agente vá parar no estado "errado" quando ele executa uma ação).
Os parâmetros default correspondem a:
python gridworld.py -a value -i 100 -g BridgeGrid --discount 0.9 --noise 0.2
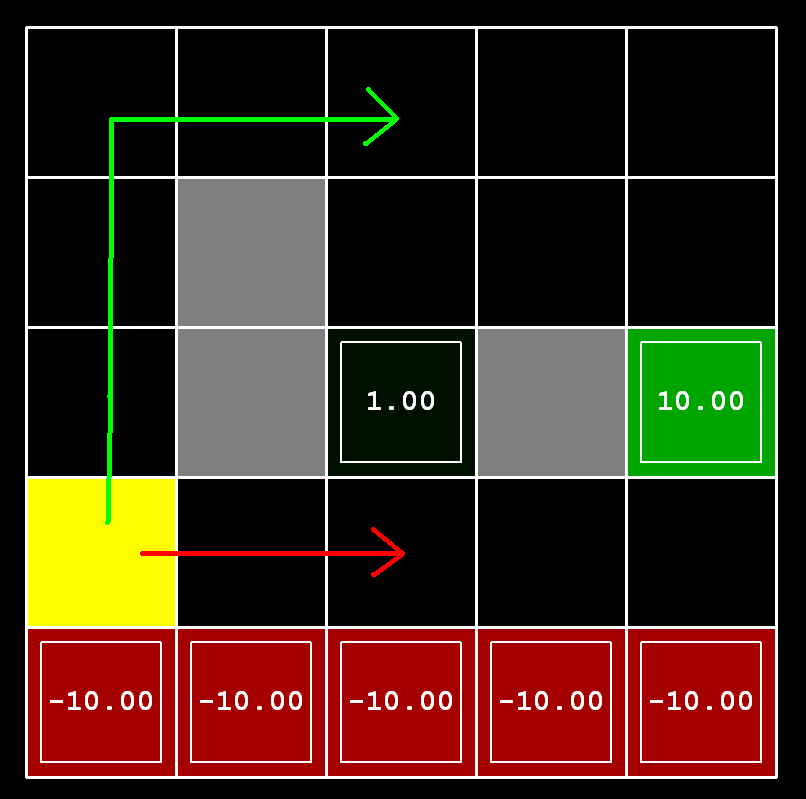
Passo 3 (1.5 ponto) Considere
o DiscountGrid, mostrado abaixo. Este grid tem dois estados
terminais com recompensa positiva (mostrados em verde), uma saída próxima
com recompensa +1 e uma saída mais distante com recompensa +10. A linha mais baixa do
grid consiste de estados terminais com recompensa negativa (mostrados em vermelho);
cada estado nessa região de "precipício" tem recompensa -10. O estado inicial é o quadrado
amarelo. Podemos distinguir entre dois tipos de caminho:
(1) caminhos que "arriscam o precipício" e passam perto da linha mais baixa do grid;
estes caminhos são mais curtos mas tem risco maior de uma recompensa negativa, e
são representados pela seta vermelha na figura abaixo. (2) caminhos que "evitam o precipício"
e passam ao longo da parte de cima do grid; estes caminhos são mais longos mas tem menos risco de levar
a grandes recompensas negativas, e são representados por uma seta verde na figura abaixo.
Dê uma atribuição de valores de parâmetros para desconto, ruído e recompensa de viver que produzam
os seguintes tipos de política ótima ou diga que a política é impossível,
retornando a string 'NOT POSSIBLE'. O default corresponde a:
python gridworld.py -a value -i 100 -g DiscountGrid --discount 0.9 --noise 0.2 --livingReward 0.0
analysis.py nas definições
question3a() a question3e().
Nota: Você pode verificar suas políticas na GUI. Por examplo no item 3(a), a seta em
(0,1) deve apontar para a direita, a seta em (1,1) também deve apontar para a direita, e a seta em
(2,1) deve apontar para cima.
O seu agente de iteração de valor não aprende a partir da própria experiência. Ao invés disso, ele usa o seu modelo PDM para calcular uma política completa antes de interagir com o ambiente. Quando ele interage com o ambiente, ele simplesmente segue uma política pré-calculada (isto é, ele se torna um agente reativo). Essa diferença pode parecer sutil em um ambiente simulado como o Gridword, mas é importante no mundo real onde nem sempre se conhece o PDM verdadeiro.
Passo 4 (2 pontos) Você agora irá criar um agente q-learning, que aprende a partir
de interações com o ambiente através do método update(state, action, nextState, reward) .
Um stub do q-learner foi especificado na classe QLearningAgent em qlearningAgents.py,
e você pode selecioná-lo com a opção '-a q'. Nesse passo, você deve implementar os métodos update, getValue, getQValue, e
getPolicy .
Nota: Para getValue e getPolicy, você deve resolver empates aleatoriamente para um comportamento melhor. A função random.choice()
será útil pra isso. Em cada estado, ações que o agente ainda não executou devem ter um Q-valor de zero, e se todas as ações que o agente já tiver executado tiverem
um Q-valor negativo, a ação não executada pode ser ótima.
Importante: Você só deve acessar os Q-valores utilizando o método
getQValue nas funções
getValue e getPolicy. Isso será útil no passo 9.
Agora você pode ver o agente aprendendo sob controle manual, usando o teclado:
python gridworld.py -a q -k 5 -mLembre que o parâmetro
-k controla o número de episódios de aprendizagem.
Passo 5 (1 ponto) Complete o seu agente de q-learning implementando a seleção de ações epsilon-gulosa em getAction,
significando que ele escolhe ações aleatórias com probabilidade epsilon, e segue os melhores q-valores com probabilidade 1-epsilon.
python gridworld.py -a q -k 100Os q-valores finais devem ser parecidos com os do agente de iteração de valor, especialmente em caminhos por onde o agente passa muitas vezes. Porém, a soma das recompensas será menor do que os q-valores por causa das ações aleatórias e da fase inicial de aprendizagem.
Você pode escolher um elemento aleatoriamente de uma lista chamando a função random.choice.
Você pode simular uma variável binária aleatória com probabilidade p
de sucesso usando util.flipCoin(p), que retorna True com
probabilidade p e False com probabilidade 1-p.
Passo 6 (0.5 ponto) Primeiro, treine um agente de q-learning completamente aleatório com a taxa de aprendizagem default no BridgeGrid (sem ruído) por 50 episódios e observe se ele encontra a política ótima.
python gridworld.py -a q -k 50 -n 0 -g BridgeGrid -e 1Agora tente o mesmo experimento com o epsilon igual a 0. Existe algum epsilon e taxa de aprendizagem para os quais é altamente provável (chance maior que 99%) que a política ótima será aprendida depois de 50 iterações? Coloque na definição
question6() OU os valores de (epsilon, learning rate)
para os quais isso acontece OU a string 'NOT POSSIBLE'. O epsilon é controlado pelo parâmetro -e e a taxa de aprendizagem pelo parâmetro -l.
Passo 7 (0.5 ponto) Sem modificar nada, você deve ser capaz de executar o robô Crawler que também aprende com q-learning:
python crawler.pySe não funcionar, você deve ter feito algo específico para o
GridWorld e deve consertar o código para que ele seja genérico pra qualquer PDM.
Passo 8 (0.5 ponto) Hora de jogar Pac-Man! O Pac-Man vai jogar jogos em duas fases.
Na primeira fase, de treinamento, o Pac-Man vai começar a aprender os valores dos estados e ações.
Mesmo para grids pequenos, o Pac-Man demora muito tempo para aprender os q-valores, por isso a fase de treinamento não é
mostrada na GUI ou na linha de comando. Quando o treinamento termina,
começa a fase de teste. Na fase de teste, os parâmetros self.epsilon
e self.alpha do Pac-Man serão fixos em 0.0, efetivamente parando o aprendizado (e a exploração), para que o Pac-Man possa aproveitar a política aprendida.
Essa fase é mostrada na GUI por default. Sem mudar nada no seu código você deve ser capaz de rodar um agente de q-learning para o Pac-Man em tabuleiros pequenos
da seguinte forma:
python pacman.py -p PacmanQAgent -x 2000 -n 2010 -l smallGridNote que
PacmanQAgent já está definido em termos do QLearningAgent. O
PacmanQAgent só é diferente porque ele tem parâmetros mais eficientes para o Pac-Man (epsilon=0.05, alpha=0.2, gamma=0.8).
Com esses parâmetros, o seu agente deve ganhar 80% dos últimos 10 episódios.
Dica: Se o seu QLearningAgent funciona para o gridworld.py e para o
crawler.py mas não consegue aprender uma boa política para o Pac-Man no smallGrid,
pode ser que o seu código dos métodos getAction e/ou getPolicy não consideram em alguns casos ações não executadas de maneira correta.
Nota: Se quiser mudar os parâmetros de aprendizagem, use a opção -a, por exemplo -a epsilon=0.1,alpha=0.3,gamma=0.7.
Estes valores aparecerão como self.epsilon, self.discount e self.alpha dentro do agente.
Nota: Embora um total de 2010 jogos serão jogados, os primeiros 2000 jogos não serão mostrados por causa da opção -x 2000,
que designa os 2000 primeiros jogos para treinamento. Logo, você só verá o Pac-Man jogar os últimos 10 desses jogos, na fase de teste. O número de jogos de treinamento
também pode ser passado para o agente com a opção numTraining.
Nota: Se você quiser ver 10 jogos de treinamento, use o comando:
python pacman.py -p PacmanQAgent -n 10 -l smallGrid -a numTraining=10
Você deve entender que: o estado do PDM state é a configuração exata do tabuleiro, com a função de transição descrevendo todas as possíveis mudanças daquele estado, considerando simultaneamente tanto o Pac-Man quanto os fantasmas.
Qundo o Pac-Man termina a fase de treinamento, ele deve passar a ganhar na fase de teste pelo menos 90% do tempo, já que ele estará utilizando a política aprendida.
Porém, treinar o mesmo agente no mediumGrid pode não funcionar bem. Na nossa implementação, as recompensas médias do
Pac-Man na fase de treinamento ficam sempre negativas. E na fase de teste, ele perde todos os jogos. Isso acontece em tabuleiros maiores porque cada configuração do tabuleiro
é um estado separado com q-valores próprios. Ele não tem como fazer a generalização de que encostar em um fantasma é ruim em qualquer posição.
Passo 9 (1.5 ponto)
Implemente um agente de q-learning aproximado que aprenda pesos para características do estado, onde os estados compartilham características.
Escreva sua implementação na classe ApproximateQAgent em qlearningAgents.py,
que é uma subclasse de PacmanQAgent.
Nota: O q-learning aproximado supõe a existência de uma função de características f(s,a) que recebe pares estado-ação, e retorna um vetor
f1(s,a) .. fi(s,a) .. fn(s,a)de características. Funções de características são dadas em
featureExtractors.py.
Vetores de características são objetos util.Counter que contém pares não nulos de característica-valor; todas as características omitidas tem valor zero.
A função Q aproximada tem a seguinte forma:
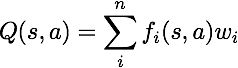

Por default, o ApproximateQAgent usa o IdentityExtractor, que atribui uma característica para cada par (estado,ação).
Com esse extrator de característica, seu agente de q-learning aproximado deve funcionar de forma idêntica ao PacmanQAgent. Você pode testar isso com o
seguinte comando:
python pacman.py -p ApproximateQAgent -x 2000 -n 2010 -l smallGrid
Importante: ApproximateQAgent é uma subclasse de QLearningAgent, logo ela herda vários métodos como getAction.
Os métodos em QLearningAgent devem chamar getQValue ao invés de acessar os q-valores diretamente, pra que os novos valores aproximados sejam
utilizados.
Quando o seu agente funcionar corretamente com o IdentityExtractor, rode o seu Q-learning aproximado com outros extratores e veja o Pac-Man ganhar:
python pacman.py -p ApproximateQAgent -a extractor=SimpleExtractor -x 50 -n 60 -l mediumGridAté tabuleiros maiores podem ser aprendidos com o
ApproximateQAgent (pode demorar alguns minutos para treinar):
python pacman.py -p ApproximateQAgent -a extractor=SimpleExtractor -x 50 -n 60 -l mediumClassic
Se não houver erros, o seu agente de q-learning aproximado deve ganhar quase o tempo com essas características simples, mesmo com só 50 jogos de treinamento.